

Recently, Fangzheng Qi, a 2022 master's student, and Xiwen Ma, a 2021 doctoral student, published a research paper entitled "Tropical cyclone tracking for autonomous underwater vehicles based on forecast path correction model" in Ocean Engineering, with researcher Jinsong Yang as the corresponding author. The School of Oceanography of Shanghai Jiao Tong University is the first completion unit.
The traditional tropical cyclone (TC) observation methods have increasingly failed to meet the needs of the development of marine science. It is foreseeable that unmanned and intelligent observation measures will be the direction of ocean observation in the future. Different from the passive observation method, this study proposes a feasible scheme for AUVs to actively track TCs and correct the trajectory forecast error in real time, based on the idea of tracking the center of the TC-induced flow field to determine the center of TCs (Fig. 1).
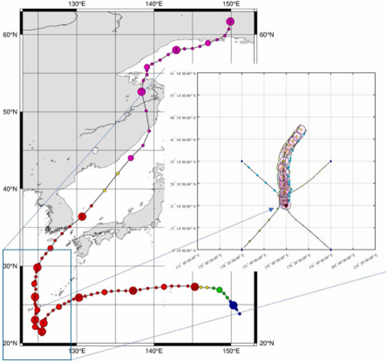
Fig. 1. Four AUVs simulated the tracking of TC Hinnamnor over a period of time.
The forecast path correction model (Fig. 2) defines four types of points, which are mainly used as computational objects of the model to characterize a specific TC tracking process. In this study, a data processing module and a current calculation module are also designed for updating the key points to be calculated. In addition to this, the correction algorithm can be designed to achieve trajectory correction by analyzing the established trajectory errors and then speculating the errors of future forecast points.
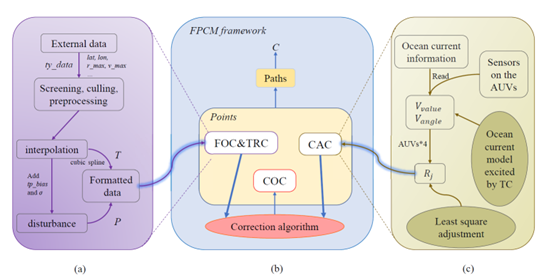
Fig. 2. Schematic diagram of the abbreviated flow of the forecast path correction model framework
The model employs a polygonal localization method in the calculation of critical path points to determine the center of a current excited by a TC with a stable structure. The correction algorithm determines the AUV tracking trajectory while correcting the errors introduced by the TC path forecast data. Finally, the article verifies the validity of the model through simulation experiments (Fig. 3).
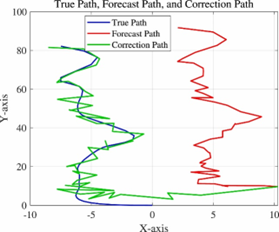
Fig. 3. Simulated paths for three types of path points.
By analyzing the nature of the error in the simulation results, the AUV successfully matches the mean and variance of the error generated by the current data to the theoretical expectation. It should be noted that the application scenarios in this paper involve many interrelated logical relationships that cannot be broken down into isolated mathematical problems. Although the algorithm shows better performing results in simulation, further improvement still requires support from real-world data. This paper lays the foundation for continuous TC tracking of AUVs under realistic conditions, which also opens up the possibility of efficient data collection during field operations.
This project is supported by the National Natural Science Foundation of China, the Oceanic Interdisciplinary Program of Shanghai Jiao Tong University, Innovation Group Project of Southern Marine Science and Engineering Guangdong Laboratory (Zhuhai).
F.Z. Qi, X.W. Ma and J.S. Yang, 2024. “Tropical cyclone tracking for autonomous underwater vehicles based on forecast path correction model” , Ocean Engineering.
Paper's URL:
https://www.sciencedirect.com/science/article/pii/S0029801824001057?via%3Dihub
https://doi.org/10.1016/j.oceaneng.2024.116768



